Automatisierung für die flexible Fertigung
Zuverlässige Qualität. Entlastung von Mitarbeitern. Ab Losgröße 1.
In der Produktion kleiner und mittlerer Stückzahlen steigen die Anforderungen: höhere Qualitätsstandards, mehr Variantenvielfalt und zunehmender Kostendruck bei gleichzeitigem Fachkräftemangel.
Klassische Automatisierungslösungen sind dafür häufig zu teuer, zu unflexibel und dadurch nur für große Serien wirtschaftlich einsetzbar.
Intelligente Roboter- und visuelle Assistenzsysteme ermöglichen es, manuelle Arbeitsschritte zu unterstützen oder körperlich belastende, repetitive Tätigkeiten zuverlässig zu übernehmen – eine Technologie, die PROFACTOR seit vielen Jahren in realen Produktionsumgebungen entwickelt und einsetzt.
So lassen sich Prozesse schrittweise automatisieren, Mitarbeitende gezielt entlasten und Produktivität sowie Qualität nachhaltig steigern.
Intelligente Robotersysteme
Flexible Robotik zur teilweisen oder vollständigen Automatisierung manueller Arbeitsschritte
- Roboter erfassen die Arbeitssituation über intelligente Sensorik und passen den Prozessablauf selbstständig an.
- Bearbeitungs- und Handling-Prozesse werden reproduzierbar in konstanter Qualität ausgeführt und lassen sich bei Bedarf flexibel umstellen.
- Mitarbeitende werden von körperlich belastenden oder repetitiven Tätigkeiten entlastet und für wichtigere Aufgaben eingesetzt.
- Ideal geeignet für variantenreiche Prozesse oder Losgröße-1-Fertigung.
Visuelle Assistenz für manuelle Arbeitsschritte
Digitale Unterstützung für Prozesse, die nicht automatisiert werden können oder sollen.
- Kamerabasierte Sensoren und KI-basierte Algorithmen erkennen und bewerten die Situation, auch in unstrukturierten Arbeitsumgebungen
- Mitarbeiter bekommen relevante Hinweise direkt auf das Bauteil oder den Arbeitsplatz projiziert. Wie eine Navigationssystem für die Losgröße-1 Fertigung.
- Diese Systeme entlasten Mitarbeiter, speziell bei komplexen Arbeitsabläufen oder hoher Variantenvielfalt.
- Perfekt geeignet fürs Kommissionieren von Einzelteilen, Montage von Baugruppen oder für manuelle Qualitätssicherungsaufgaben.
Technologien im Einsatz
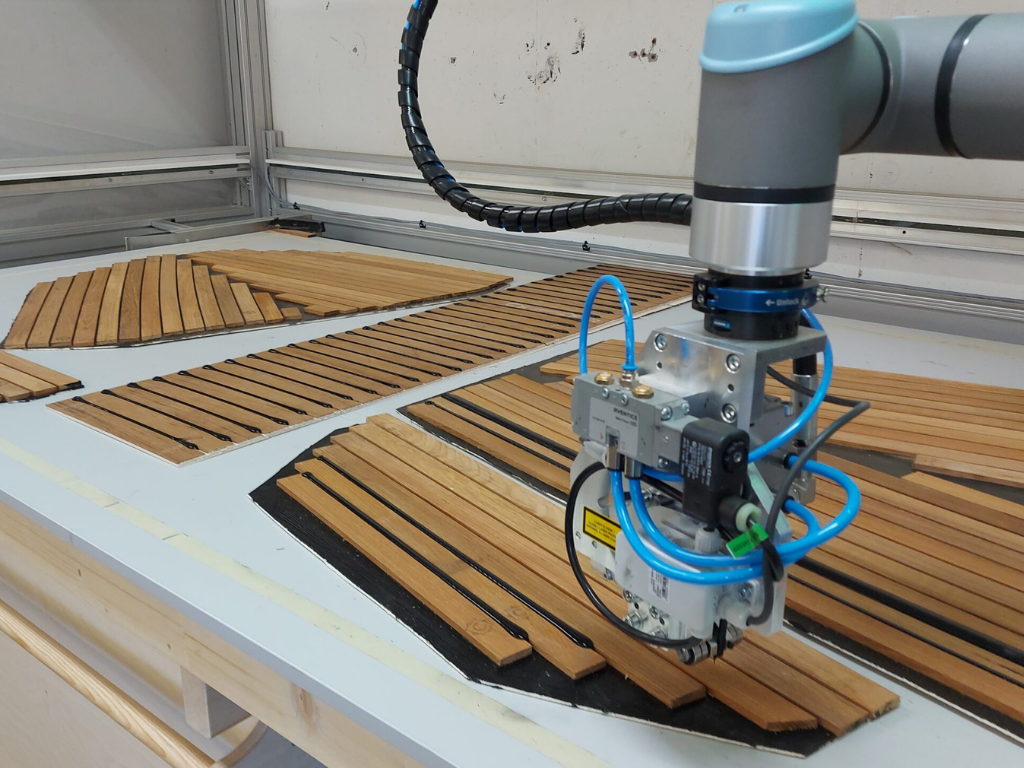
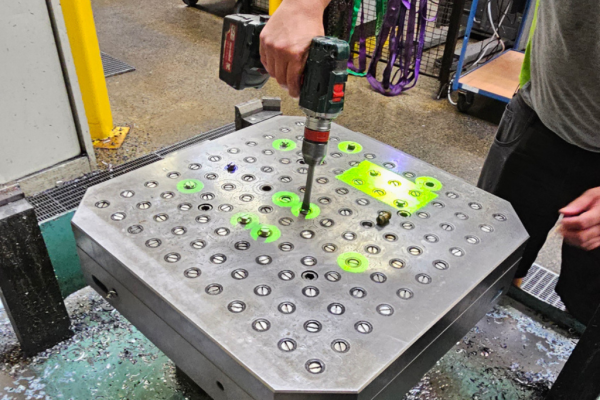
Leichtbauroboter
Leichtbauroboter sind prädestiniert für die Zusammenarbeit mit Menschen am Arbeitsplatz und benötigen keine abgeschlossenen Roboterzellen. Durch ihre kraftsensitive Steuerung bieten sie Sicherheit für Mitarbeiter und sind gleichzeitig ideal für Bearbeitungsprozesse, die einen definierte Anpressdruck benötigen, wie Schleifen, Polieren etc.
Automatisierte Bildverarbeitung & KI
Je nach Anwendung kommen Industriekameras und KI-basierte Softwarealgorithmen zum Einsatz, die die Arbeitsplatzsituation oder die Bauteile selbsttätig erkennen.
Automatisierte Prozesspfaderzeugung
Basierend auf der Erkennung des Bauteilgeometrie mittels Kameras und Sensoren berechnet das System die notwendigen Roboterpfade vollständig automatisch. Die einmal vorgegebenen Prozessparameter dienen als Schablone und werden entsprechend automatisch angepasst.
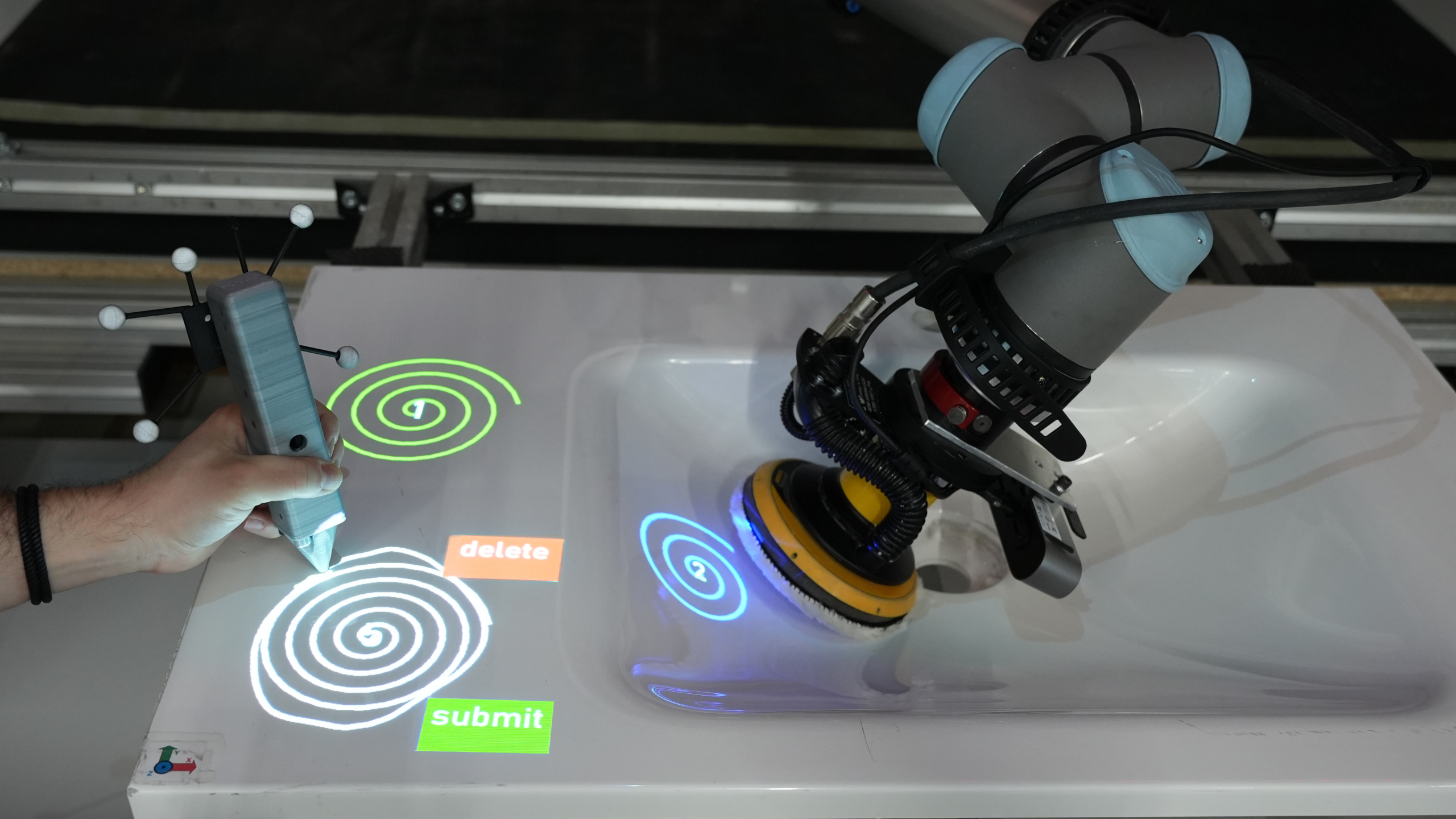
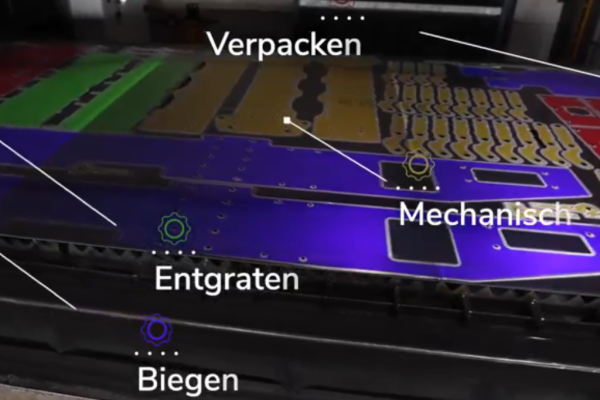
Digitale Projektion
Durch Projektion von Informationen direkt auf den Arbeitsplatz, auf Baugruppen oder Objekte im 3D Raum , können Arbeitsschritte schneller ausgeführt und Fehler vermieden werden. Für größere Flächen werden mehrere leistungsstarke Projektoren verwendet.
Sehr einfache Bedienung
Mitarbeiter können sich auf die Arbeit konzentrieren.
Moderne Technologien zur Interaktion mit Maschinen wie Stifteingabe, Gestenerkennung oder Visualisierung durch Projektion verbessern die Produktivität und reduzieren Fehlerquellen und Einschulungsaufwand.
Lösungen für die flexible Produktion
Die Entwicklung der Kerntechnologie im eigenen Haus ermöglicht uns eine individuelle Anpassung der Lösungen an kundenspezifische Anforderungen.




Mehrwert durch intelligente Robotik und visuelle Assistenz
Langjährige Erfahrung ermöglicht maßgeschneiderte, zuverlässige Lösungen für Ihre Produktion.

Effizienterer Einsatz Ihrer Mitarbeiter
Zuverlässige Fertigungsqualität und bessere Ergonomie
Flexibilität, Wirtschaftlichkeit und Losgröße-1 Tauglichkeit
Anwendungsbereiche in der Praxis
Ausgewählte Praxisbeispiele zeigen den vielfältigen Einsatz unsere intelligenten Roboter- und Assistenzsysteme.
PROFACTOR, Ihr Technologiepartner
Von der innovativen Idee zur industriellen Umsetzung.
Anforderungen, Konzept & Machbarkeit
Nach dem ersten Informationsaustausch klären wir Ziele, Anforderungen und die Fertigungssituation.
Bei Bedarf prüfen wir anhand von Musterteilen die grundsätzliche Machbarkeit der geplanten Lösung bei uns im Labor.
So entsteht ein gemeinsames Verständnis für das Lösungskonzept mit grober Kostenschätzung als Basis für die folgenden Phasen.
Spezifikation, Angebot und Engineering
Auf Basis der Machbarkeit und Ihrer Spezifikationen erstellen wir ein detailliertes Angebot.
Wir entwickeln die Lösung, testen das System im Haus und bereiten die Lieferung vor.
Inbetriebnahme und Service
Nach Inbetriebnahme in Ihrer Fertigungsumgebung validieren wir die Systemleistung durch Abnahmetests, schulen Ihre Mitarbeiter und übergeben Ihnen das System für den Serienbetrieb.
Unser Service-Team unterstützt Sie gerne bei Fragen zur Bedienung, Wartungsaufgaben oder Systemerweiterungen, um eine langfristige Verfügbarkeit des Systems zu garantieren.
Erprobte Partnerschaften
Ausgewählte Kunden und Partner aus gemeinsamen Entwicklungs- und Industrieprojekten.
Aktuelle Forschungsprojekte
Unser Technologie-Portfolio basiert auf einer Vielzahl von Forschungsprojekten mit nationalen und internationalen Partnern aus der Industrie, Universitäten und Forschungseinrichtungen.
Wir kombinieren Anforderungen aus der Praxis und globalen Trends und entwickeln vorausschauende Forschungsvorhaben. So sichern wir gemeinsam mit unseren Partnern die Wettbewerbsfähigkeit der industriellen Produktion.

KIRAMET

AI5innovation

ZERO³
Downloads
Digitale Assistenz für Effizientes Rüsten
StepWise – Digitale Bewertung der Gehfähigkeit in der Rehabilitation
Q-Station – Assistenzsystem für die Qualitätskontrolle
Robotische und Digitale Assistenz – Wie digitale Technologien Ihre Mitarbeiter entlasten und gleichzeitig den Output erhöhen



Ansprechpartner:in
Head of Business Development+43 7252 885-252
christoph.brandstaetter@profactor.at