Automation for Flexible Manufacturing
Reliable quality. Less strain on employees. From lot-size-one onwards.
In the production of small and medium batch-sizes, demands are increasing: higher quality standards, greater product variety and growing cost pressure, all while facing a shortage of skilled labour.
Traditional automation solutions are often too expensive and too inflexible, making them economically viable only for large series.
Intelligent robotic and visual assistance systems make it possible to support manual work steps or reliably take over physically demanding, repetitive tasks – a technology that PROFACTOR has been developing and deploying in real production environments for many years.
This allows processes to be gradually automated, employees to be relieved where it matters most, and both productivity and quality to be sustainably increased.
Intelligent Robotic Systems
Flexible robotics for the partial or complete automation of manual work steps.
- Robots perceive the work situation through intelligent sensors and autonomously adjust the process.
- Machining and handling operations are carried out reproducibly with consistent quality and can be flexibly reconfigured if necessary.
- Employees are relieved of physically demanding or repetitive tasks and can focus on more important activities.
- Ideally suited for processes with high product variety or batch-size-one production.
Visual Assistance for Manual Work Steps
Digital support for processes that cannot or should not be automated.
- Camera-based sensors and AI-based algorithms recognize and evaluate the situation, even in unstructured work environments.
- Employees receive relevant guidance projected directly onto the component or the workstation – like a navigation system for batch-size-one production.
- Systems relieve employees, especially during complex workflows or when handling a high variety of products.
- Perfectly suited for picking individual parts, assembling components, or performing manual quality assurance tasks.
Technologies
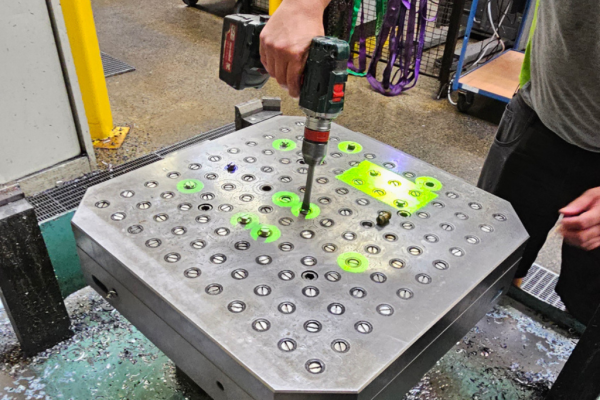
Lightweight Robots
Lightweight robots are ideal for collaboration with humans in the workplace and do not require enclosed robot cells. Thanks to their force-sensitive control, they ensure employee safety while being perfectly suited for processing tasks that require a defined contact pressure, such as grinding, polishing or similar operations.
Automated Image Processing & AI
Depending on the application, industrial cameras and AI-based software algorithms are used to automatically recognize the work situation or the components.
Automated Process Path Generation
Based on the recognition of component geometry using cameras and sensors, the system automatically calculates the required robot paths. Once defined, the process parameters serve as a template and are adjusted automatically.
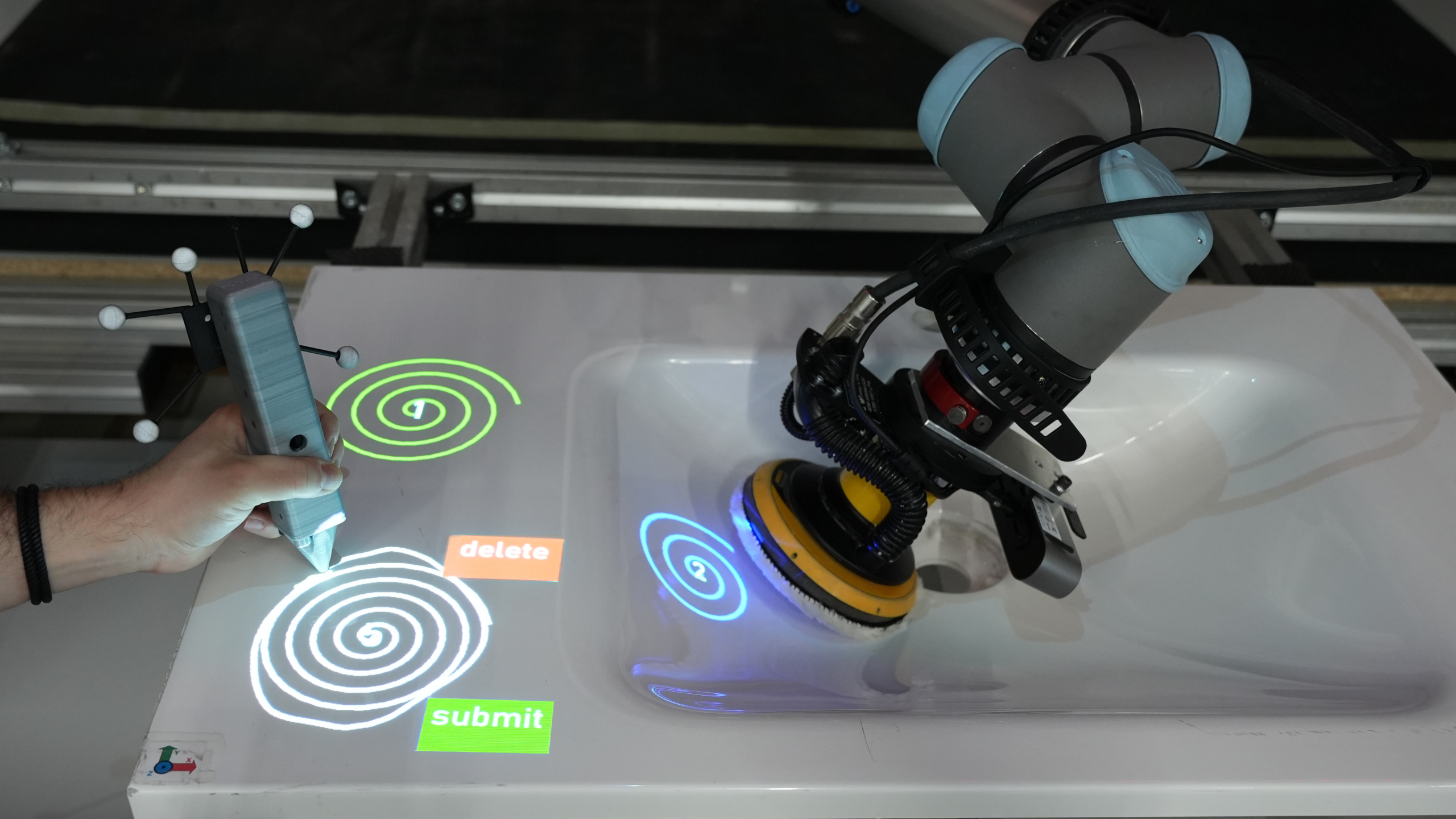
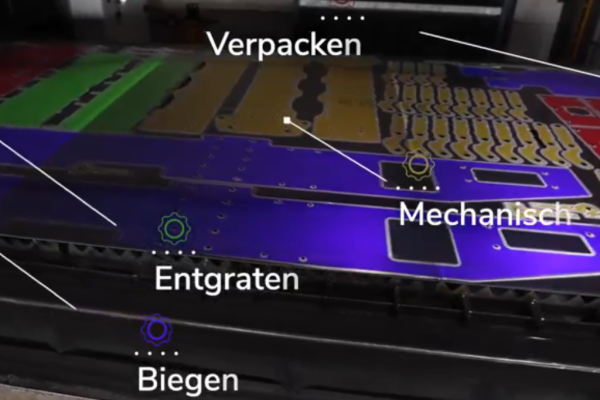
Digital Projection
By projecting information directly onto the workstation, assemblies or 3D objects, tasks can be performed faster and errors can be avoided. For larger areas, multiple high-performance projectors are used.
Easy Operation
Employees can focus on their work.
Modern technologies for interacting with machines, such as pen input, gesture recognition, or projection-based visualization, enhance productivity while reducing errors and training effort.
Solutions for Flexible Production
Developing the core technology in-house allows us to tailor solutions individually to meet specific customer requirements.




Added Value through Intelligent Robotics and Visual Assistance
Years of experience enable us to provide customized, reliable solutions for your production.

More Efficient Use of Your Employees
Reliable Manufacturing Quality and Better Ergonomics
Flexibility, Cost-Effectiveness, and Suitability for Batch-Size-One
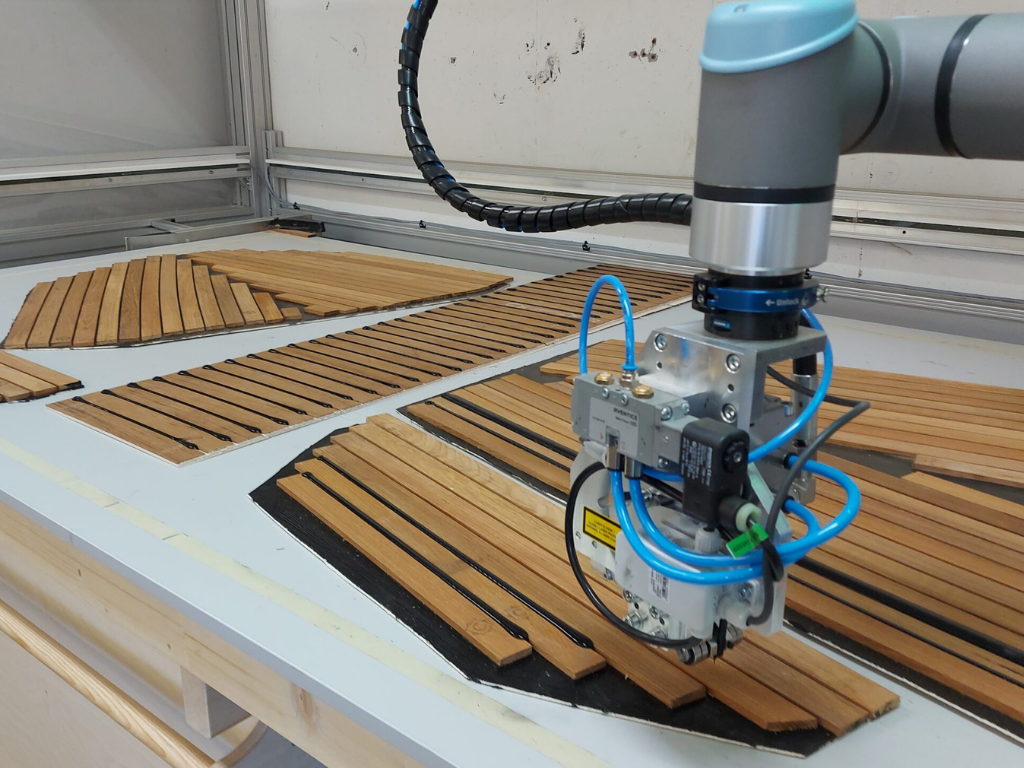
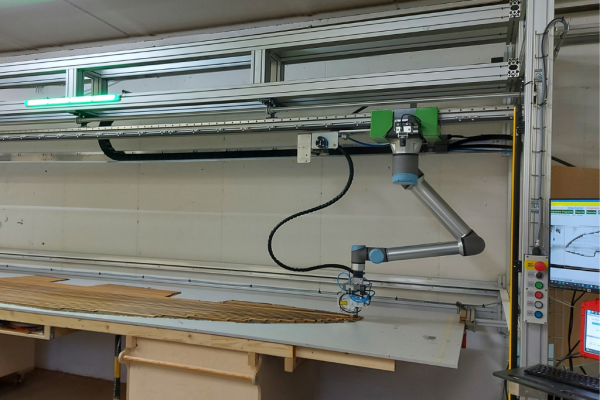
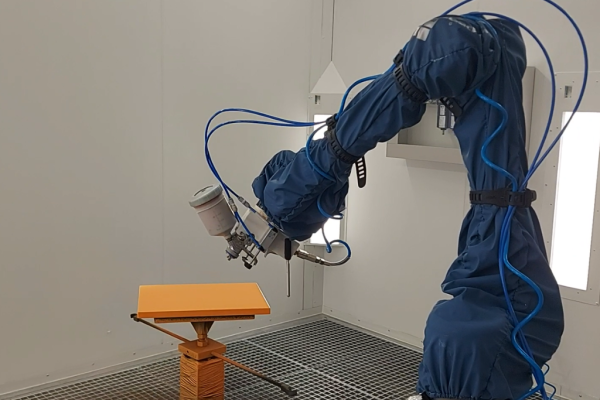
Application Areas
Selected real-world examples demonstrate the diverse applications of our intelligent robotic and assistance systems:
PROFACTOR, Your Technology Partner
From innovative ideas to industrial implementation.
Requirements, Concept, and Feasibility
After the initial exchange of information, we clarify objectives, requirements, and the manufacturing situation.
If needed, we test the basic feasibility of the planned solution using sample parts in our laboratory.
This creates a shared understanding of the solution concept, along with a rough cost estimate as a basis for the following phases.
Specification, Quotation, and Engineering
Based on feasibility and your specifications, we prepare a detailed quotation.
We develop the solution, test the system in-house, and prepare it for delivery.
Commissioning and Service
After commissioning in your production environment, we validate system performance through acceptance tests, train your employees, and hand over the system for series operation.
Our service team is available to assist with questions regarding operation, maintenance tasks, or system upgrades, ensuring long-term system availability.
Proven Partnerships
Selected customers and partners from joint development and industrial projects.
Current Research Projects
Our technology portfolio is based on a large number of research projects with national and international partners from industry, universities and research institutions.
We combine industry requirements and global trends to develop forward-looking research projects. In this way, we work with our partners to ensure the competitiveness of industrial production.

KIRAMET

ZERO³

VRoboCoop
Downloads
Q-Station – Production Assistance System
Robotic and Digital Assistance – How digital technologies can relieve your employees while increasing the output



Contact person
Head of Business Development+43 7252 885-252
christoph.brandstaetter@profactor.at