DrapeBot
Project description
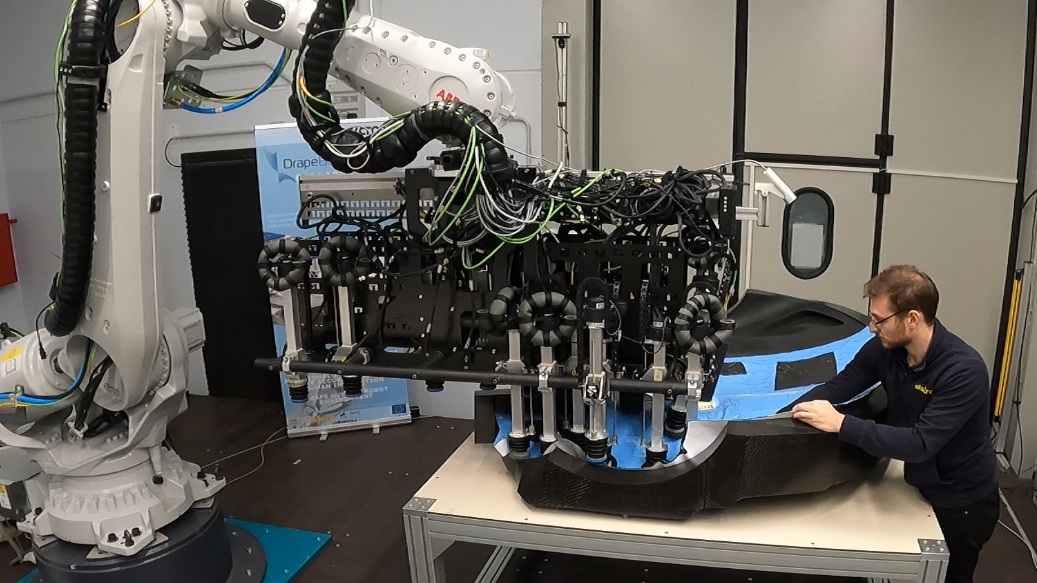
The H2020 research project DrapeBot aimed at the development of a human-robot collaborative draping process for carbon fiber composite parts. The robot will drape the large, less curved areas, while the human will drape the areas of high curvature that are difficult to reach. The transfer of large patches of fabric, which can be several meters in length, is done jointly by the robot and the human.
The project put specific emphasis on the efficiency of the collaboration, so that a real increase over human-only and robot-only draping processes is achieved. For this purpose, vision sensors will provide input to a real-time feedback control loop that adjusts the robot’s motions to enable safe transport of the material and to avoid collisions.
The demonstration was carried out on two robotic systems. At PROFACTOR, a collaborative setup with a large industrial robot was established, capable of representing the full spectrum of human-robot collaboration, and it was used for application examples in the automotive sector and boatbuilding. At DLR, a robotic cell consisting of two robots was set up, enabling limited cooperation capabilities to be demonstrated in an aerospace use case.
Demonstrations were done on two robotic workcells. The first one, based at Profactor, included a large industrial robot. IT could show the full range of human-robot collaboration on test cases from the automotive industry and from boat-building. The second workcell, based at DLR, included two industrial robots and showed limited collaboration on an aerospace test case.
To ensure usability of the draping robot in real-world applications, experimental studies were done to assess usability and trust. These results will be fed back to the design to make sure that the human-robot collaboration also works at the non-technical level.
Project objectives and technical innovation
The goal of DrapeBot was to demonstrate that collaborative draping can achieve an increase in efficiency and productivity over human-only or robot-only processes and to make the technology usable for industry.
The main innovations include:
- A robotic system for collaborative draping, which properly distributes the work load between the human and the robot, depending on the complexity of the draped parts.
- A flexible and modular gripper with integrated sensor systems that allows monitoring the position of the plies and the changes in fibre orientation during the draping process..
- Integration of vision-based sensors for real-time control of robotic motions to have an efficient and safe process, avoiding collisions, while ensuring that the task is completed with the required accuracy.
- Usability of the integrated system was ensured by performing an experimental evaluation assessing the efficiency of the collaboration and the ergonomics of the process
Application & benefits for industry
The DrapeBot project addresses the industrial manufacturing of carbon fiber composite parts through draping processes. It has applications in aerospace, automotive, boat-building and wind energy. The main features are:
- Increase accuracy and reproducibility during draping through the integrated sensor system,
- reduction of workload, especially during the transport of large plies,
- scalable and semi-automated processes also for large composite parts,
- intelligent and efficient collaboration between humans workers and industrial robots, using sensor system with real-time process feedback.
